2026年CES现场,英伟达的发布会直接火成了顶流演唱会的架势,记者们挤破头抢入场资格,安检严到连相机镜头都要反复核查。
而让全场瞬间沸腾的,就是黄仁勋那句底气十足的话“物理AI的ChatGPT时刻来了”。在场的人都心里有数,这可不是空喊口号。大家之所以挤破头要进去,就是想亲眼看看这套号称能让汽车真“会琢磨事”的技术到底能不能把智驾行业卡了好几年的脖子给解开。
毕竟这几年“高阶智驾”的口号听了一箩筐,真到用车的时候总能被各种突发情况泼冷水。说实话,现在市面上大部分智驾方案都采用了“传感器+死规则”的套路。
平时在高速上跟车、城市里平稳开着还行,可一碰到突发情况就露马脚。就比如信号灯突然黑屏、施工围挡临时变道,甚至有人突然冲出来捡东西,系统立马就“宕机”,最后只能靠狂鸣警报催着驾驶员接手。这也是为啥“高阶智驾”喊了这么久始终只是个“辅助”,没法真做到自己拿主意。
而英伟达这次推的“物理AI”还有配套的Alpamayo、AlpaSim、Drive AGX Thor这些核心技术,正好就冲着这个痛点来的。
它要解决的不是让汽车多认出几个障碍物,而是让汽车能“懂”物理规律、“想”明白前因后果,跟老司机一样一步步琢磨着做决策。
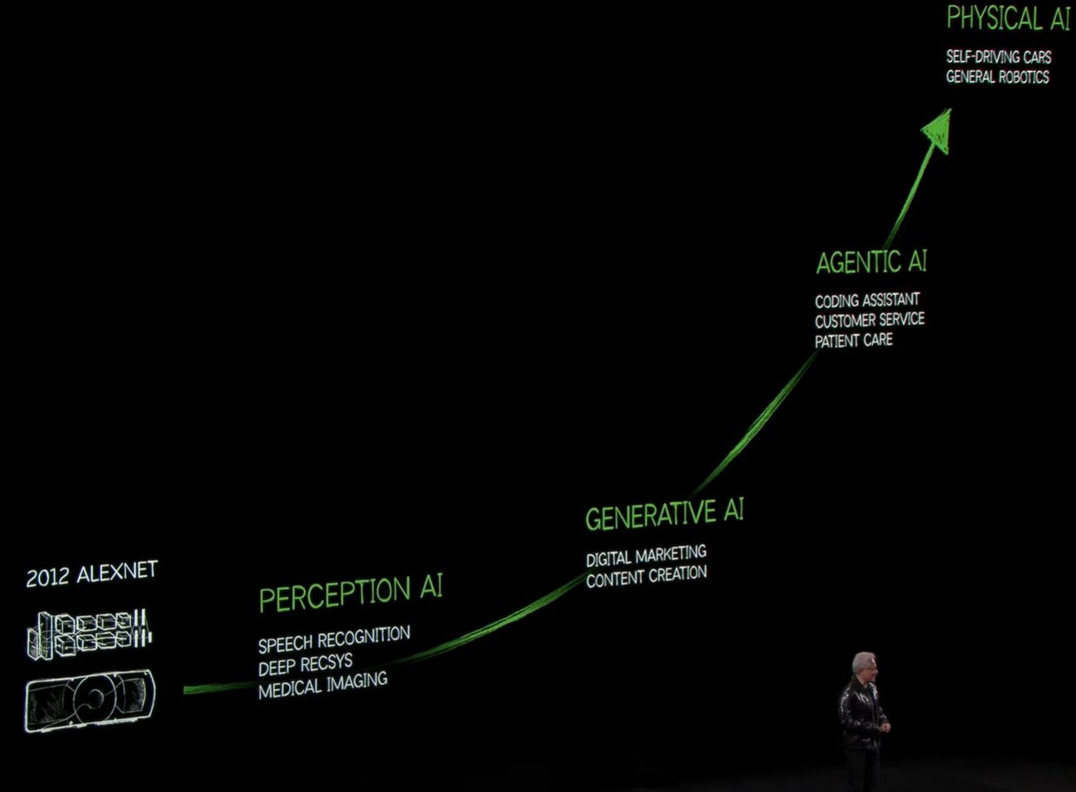
给大家掰扯明白,以前的AI再厉害也只在数字世界里管用,写代码、画图、聊天都没问题,可一到操控真实设备、适配现实世界就拉胯。而自动驾驶正好是这场技术革新的第一个“大考场”。
黄仁勋敢这么高调,底气就在这儿。
物理AI的底气 破解智驾“长尾困局”
想搞懂物理AI到底牛在哪,咱们得先捋捋自动驾驶的技术演变,这么比着看才清楚差距。最早是“规则驱动”,说白了就是给汽车定一堆“如果这样就那样”的死规矩,看到红灯就刹车、检测到行人就减速,跟个只会听指令的机器人似的,又死板又没弹性;后来进化到“感知驱动”,靠摄像头、雷达收集数据,用算法套场景规律,算是能应对些复杂路况,但本质还是“靠经验办事”;就算到了大模型时代,还是绕不开一个核心难题“长尾场景”。
可能有朋友不清楚“长尾场景”是啥,简单说就是那些不常发生但一旦发生就特别危险的非常规情况。行业里早有共识“99%的常规场景都好搞定,难就难在1%的长尾场景,而这1%恰恰决定了智驾安不安全”。
而物理AI的核心就是解决这1%的难题。
它跟传统智驾最根本的区别就是有了“像人一样琢磨事的能力”。给大家举个直观的例子:路口碰到一辆减速的车,传统系统只会认出“有车减速”然后赶紧避让。
但物理AI驱动的系统会在脑子里过一串完整的“思路”“它减速了,大概率是要左转让人行横道上的人,我得等它过去、人完全横穿完再走”。这种顺着因果关系琢磨的能力,能让系统在没见过的陌生场景里也稳得住,不用靠运气或死规则硬扛。
这里透个行业内幕,物理AI并非英伟达突然推出的新品。早在2023年,英伟达就已悄然布局该领域,通过四处挖人组建团队,专门攻克“琢磨决策”的核心难题。此次在CES高调发布,一方面是技术已然成熟,另一方面则是手握奔驰、沃尔沃等大客户订单,有了十足底气才正式公开。
双线落地 从L2++到Robotaxi
落地层面,英伟达走了条“两条腿走路”的务实路子——一边推面向咱们普通消费者的L2++,一边搞面向商业运营的L4,最终目标就是黄仁勋说的“10亿辆自动驾驶汽车上路”。
这里先给大家分清L2++和L4的核心区别,关键就在责任归谁。L2++还是驾驶员当第一责任人,系统只帮忙;L4在特定场景下系统要负主要责任,这也是为啥L4落地离不开法规托底。
先看咱们普通人最快能接触到的L2++:首个搭载的车型是全新梅赛德斯-奔驰CLA,计划2026年第一季度先在美国上路,第二季度进欧洲。
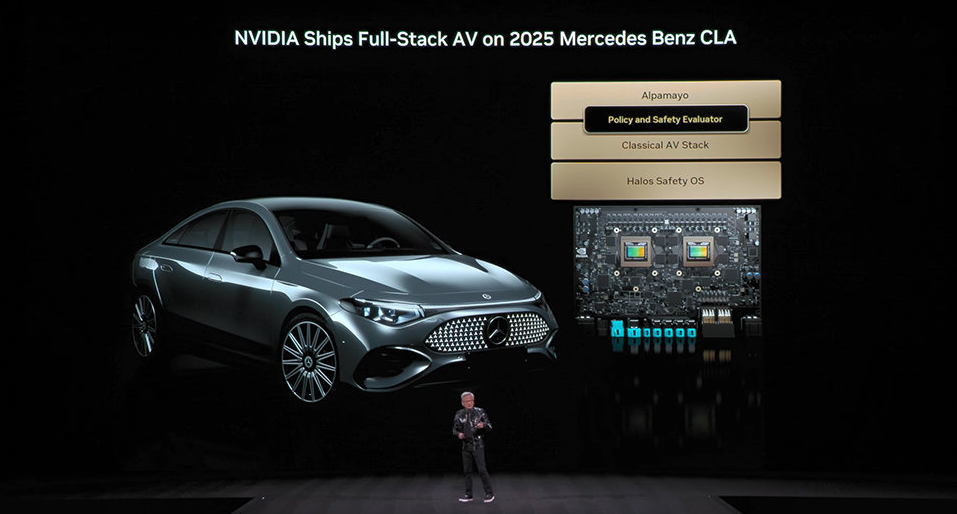
别以为这就是“L2加强版”,它用了“双系统安全套路”——一套端到端AI系统负责处理复杂场景的琢磨和决策,另一套传统“安全系统”靠死规则兜底,相当于“AI负责灵活应对,老规矩负责保安全”,双保险的设计。
比如在复杂的城市路口,AI会收集周边车辆、行人的动静,琢磨他们要干啥,然后规划最顺的路线;要是碰到突然有动物窜出来这种AI没把握的情况,就立马切到传统安全系统,减速、停车,用最保守的方式保证安全。
奔驰为啥选英伟达合作L2++?说实话是自家智驾系统在欧洲测试时长尾场景的故障率太高,而英伟达的Alpamayo模型能把这些长尾问题的解决率提上去40%以上。
不过这里有个细节要提,奔驰在中国市场的部分车型还是用的华为智驾方案。这不是谁好谁坏,而是行业常规操作——华为智驾更适配国内复杂的非机动车、行人混行的路况,车企都是“哪个好用选哪个”,怎么顺手怎么来。
再看更激进的L4层面:英伟达计划2026年第一季度先在美国搞小规模测试,2027年推出Robotaxi服务。这套方案不是画饼,靠的是基础模型、端到端架构和推理模型的配合,目标是在特定区域实现“不用人干预就能开”。
目前已经和美国自动驾驶公司Cruise达成合作,测试区域选在了加州——这里法规松、气候好,适合攒数据。测试车会装双Thor芯片和全套传感器,覆盖城市道路和高速路,为2027年Robotaxi落地攒关键数据。
核心杀手锏 开源生态筑壁垒
不管是L2++还是L4,能落地都离不开两个核心“黑科技”:Alpamayo和AlpaSim。前者是负责做决策的“大脑”,后者是用来打磨技术的“练兵场”,少了哪个都不行。
先讲Alpamayo,这是全球第一个开源的视觉-语言-行动推理模型,有10亿参数规模,能同时处理视频和传感器的输入,输出行驶路线的时候还能把“琢磨的过程”说清楚。
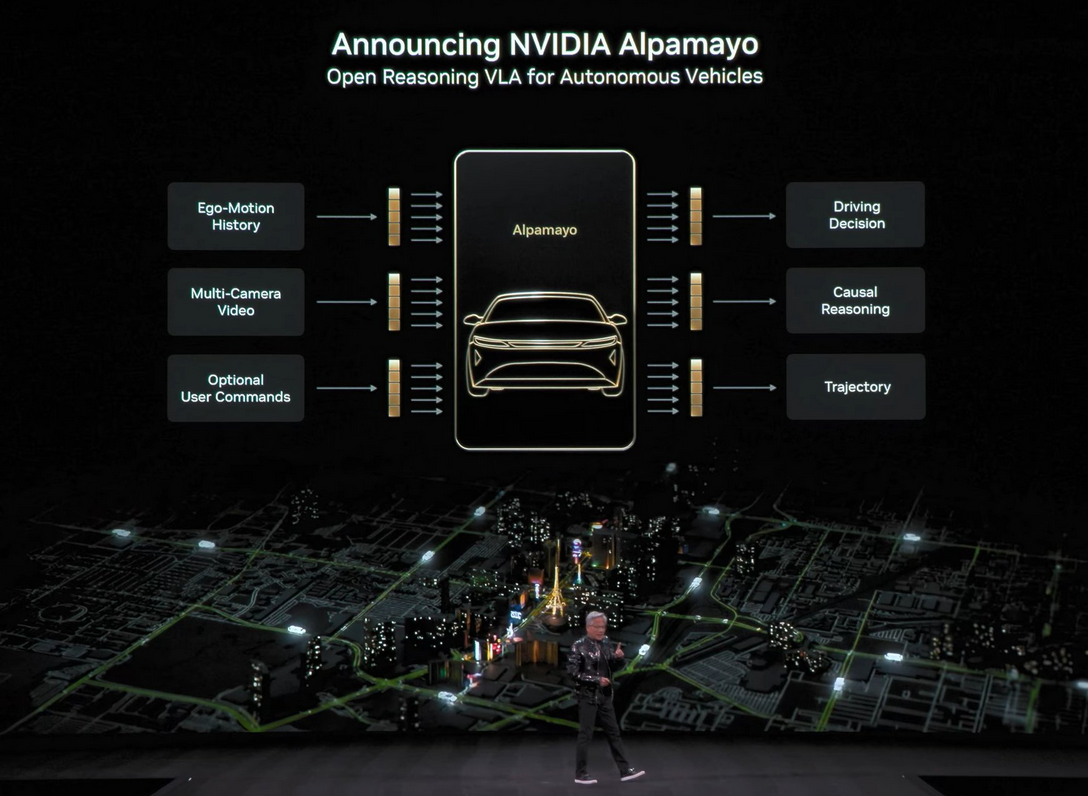
比如在路口要停车,它不只会做出停车的动作,还能讲明白为啥“看到停止标志了,左边还有车过来,还有行人在过马路,所以先减速等安全了再走”。
别小看这种“能说清理由”的能力,这对智驾技术过安全审计、过法规审核太重要了——以前的智驾系统做决策就像“黑箱子”,不知道它为啥这么选,现在能说清才能过监管这关。
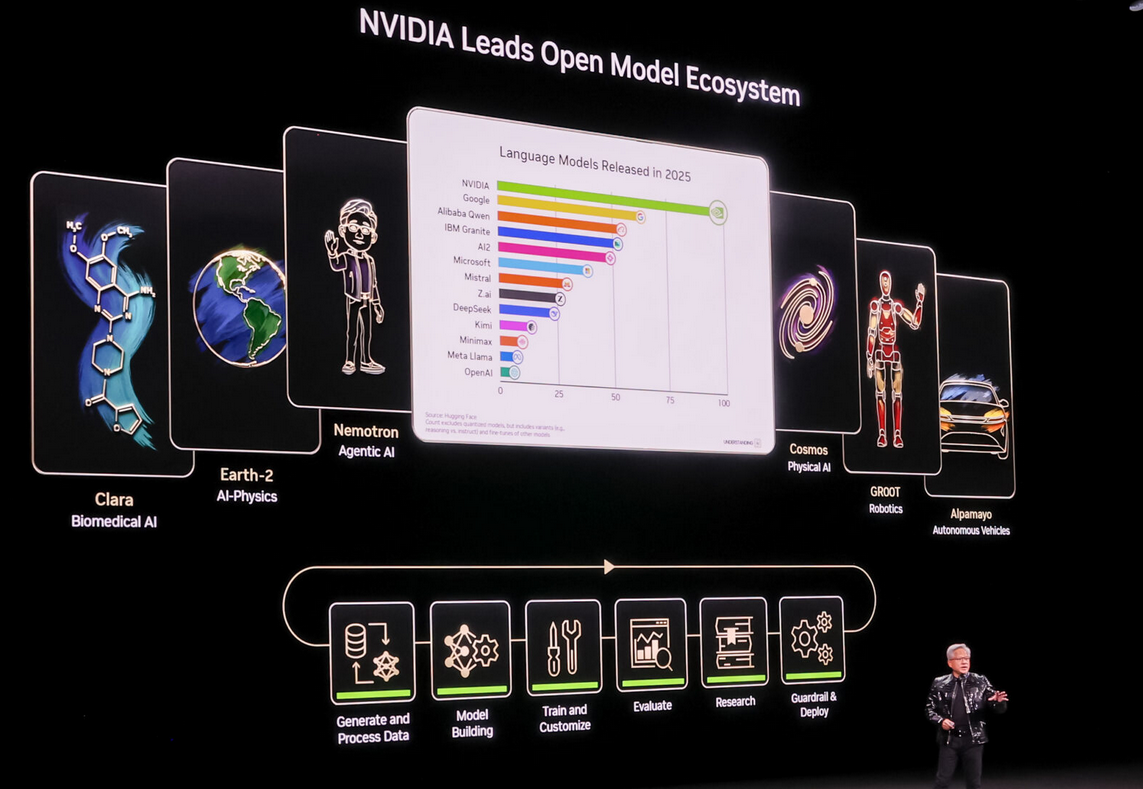
更颠覆的是Alpamayo的开源玩法,模型权重、推理脚本全在Hugging Face平台公开,代码、训练细节也一并放出来了。
这跟特斯拉、华为的闭源端到端方案完全不一样,相当于英伟达把高阶智驾的“发动机”免费对外开放了。
对中小车企来说这简直是救星——不用从零开始研发,只要稍微调一调、改一改就能适配自己的车型,还能用来自动标注数据、评估模型好不好用。
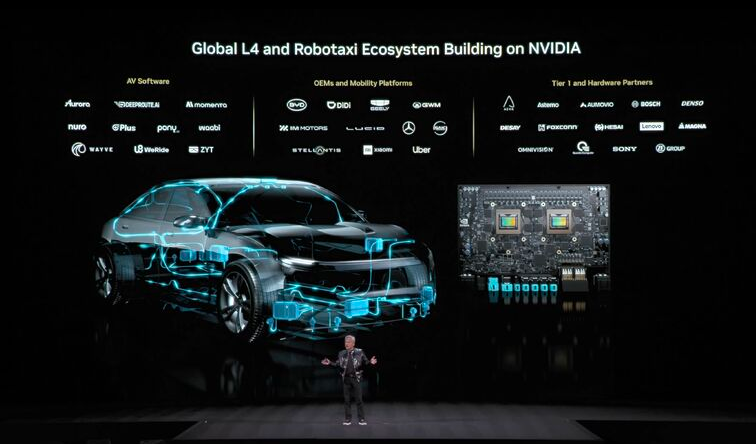
也正因为这个开源策略,捷豹路虎、Lucid、Uber这些行业玩家很快就加入了,英伟达的生态壁垒一下就建起来了。
而且配套的还有1700多小时的开放物理AI驾驶数据集,覆盖全球不少地方、各种天气条件和各类长尾场景,直接缓解了行业普遍缺数据的难题。
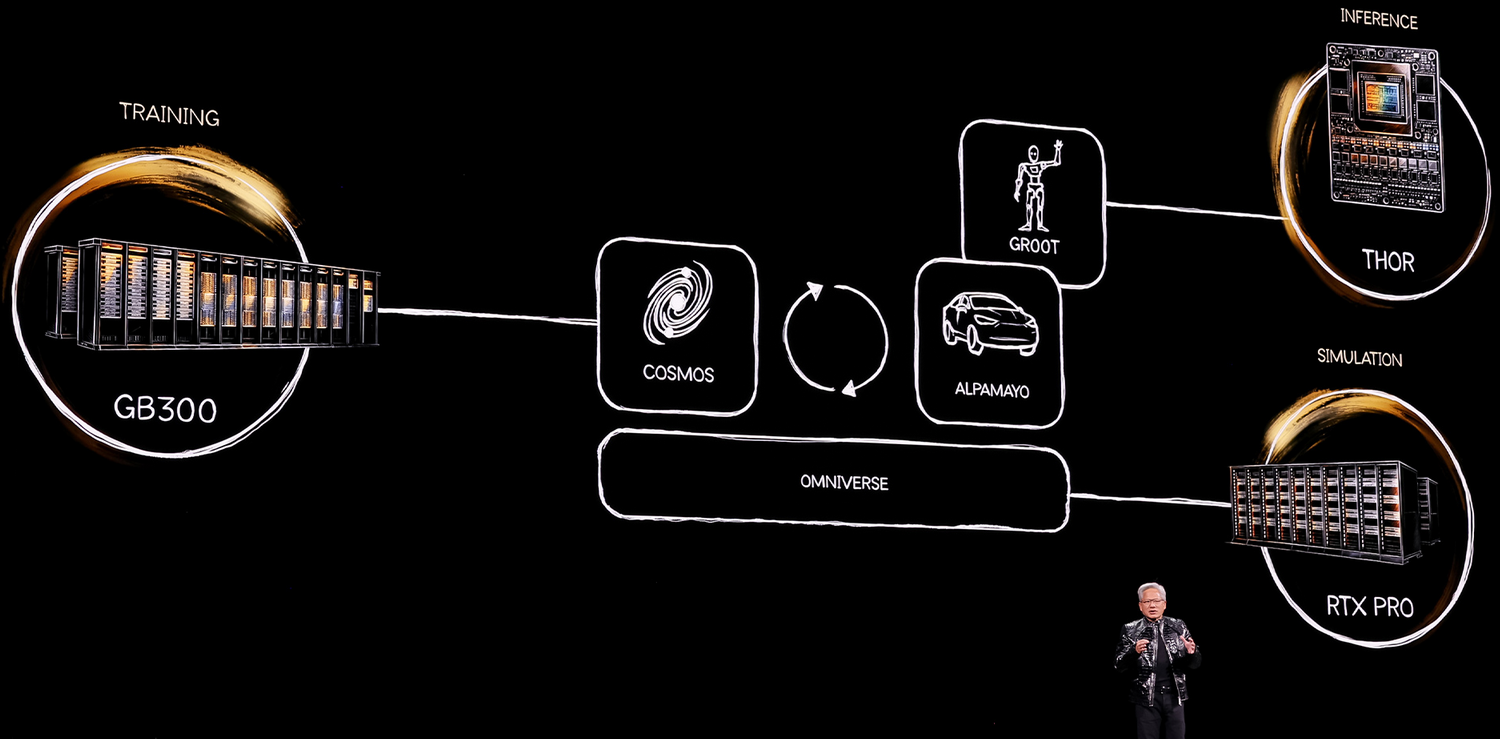
再看AlpaSim,这是个完全开源的端到端仿真框架,在GitHub上直接就能下载。它能精准模拟真实的物理环境、传感器的干扰噪声、路面的摩擦系数,还有路上行人和车辆的互动,支持“模型做决策-执行-反馈-优化”的闭环测试。
简单说,开发者能在虚拟世界里无限造极端场景——比如暴雨天信号灯坏了、施工改道还碰上行人乱穿,让Alpamayo模型在里面反复练、快速优化,大大降低了真实路测的成本和风险。
当然,相比行业不同,英伟达玩的是生态“大棋”,靠“开源模型+仿真框架+开放数据集”的组合拉低技术门槛,让中小车企也能跟上节奏,这种生态赋能的优势,后期可能会形成降维打击。
有了“大脑”和“练兵场”,还得有足够强的算力支撑,这就是Drive AGX Thor芯片的作用。
两颗Thor芯片组队,AI算力能超过2000 TOPS,比现在主流L2级智驾方案100-200 TOPS的水平高出一大截。别觉得参数枯燥,这意味着能同时扛住复杂Transformer模型运行、多传感器数据融合、高清渲染和琢磨决策这些高强度任务,而且能实时处理不卡顿。
更关键的是,Thor芯片是全栈协同设计,从芯片到中间件、参考应用、开发工具形成了完整的闭环,车企拿过去就能用,不仅能把开发周期缩短一半,还能大幅降低研发成本。
现在奔驰、捷豹路虎、沃尔沃、比亚迪这些主流车企都计划装这个算力平台,而且用的是双芯片冗余设计,一颗芯片坏了,另一颗能立马接手,这也是L4级自动驾驶的标配安全方案。
用户价值 智驾平权与安全升级
讲了这么多技术,大家最关心的肯定是这东西对咱们普通消费者到底有啥用?说实话,好处特别实在,总结下来全是干货:
安全性能直接拉满。大部分交通事故的元凶都是人为失误,物理 AI 自带的类人决策能力,再加上双保险的冗余设计,能把分心、疲劳、误判这些致命风险拦在车外,开起车来心里更踏实。
开车能彻底告别紧绷感。不管是跑长途高速熬到腰酸背痛,还是在城市里堵得心烦意乱,系统应对复杂路况的稳定性都上了一个台阶,不用再全程瞪着眼睛不敢走神,长途赶路、日常通勤都能松口气。
高阶智驾不再是豪车的专属标签。开源工具直接把技术落地的成本打了下来,以后 15-20 万级的家用车,也有机会装上这种会 “琢磨事” 的智驾功能,不用再花大几十万买豪车才能尝鲜。
咱们的出行方式也会跟着变样。2027 年 Robotaxi 服务就要加速落地,到时候无司机运营真能走进现实,网约车的成本会往下压,而且像酒后出行这种刚需场景,也能有更安全靠谱的解决方案。
当然,咱们也得客观看,技术落地从来都不是一路坦途,有三道坎是绕不开的:
仿真和现实的鸿沟很难填平。就算仿真框架做得再逼真,也没法 1:1 复刻极端天气下的路面摩擦变化,更预判不了行人突然窜出来的不规则动作,最终还是得靠海量真实路测数据,一点点把模型磨到好用。
法规和标准的更新速度跟不上技术。现在 L4 级自动驾驶的责任界定还是一笔糊涂账,一旦出了事故,责任该算车企的、供应商的还是用户的?全球范围内都没形成统一标准,这也是 Robotaxi 大规模商业化的最大卡点。
行业竞争早就杀成了红海。高通、Mobileye、地平线、华为这些玩家,都在智驾生态里卯足了劲较劲,英伟达的开源策略虽然拉低了准入门槛,但怎么守住自己的生态壁垒、保持技术领先,还得继续下苦功。
不过好消息也很明确,全球的法规完善已经踩下了加速踏板。2025 年 12 月,我国工信部已经附条件批准了首批 L3 量产车型的准入;差不多同一时间,美国奥斯汀的街头,特斯拉 Model Y Robotaxi 已经实实在在跑起来了。
有证券公司的分析特别到位:美国走的是 L4/Robotaxi 试运营的突破路子,中国则是从 L3 合规切入市场,两条路线看着不一样,本质上都是把自动驾驶从 “技术难题” 变成了 “商业问题”,这正是行业走向成熟的标志。

其实黄仁勋在 CES 上的高调表态,早就摸准了智驾行业的发展脉搏。
物理 AI 的横空出世,标志着自动驾驶正式从 “靠感知认路” 的阶段,迈入了 “靠理解和决策开车” 的新阶段,汽车也从一台冷冰冰的交通工具,变成了能自己琢磨事、还能持续进化的物理智能体,这个趋势已经没人能挡得住。
对咱们普通人来说,真不用纠结那些眼花缭乱的技术参数,记住一句话就行:从 2026 年开始,智能驾驶会越来越聪明、越来越安全,“躺着开车” 的出行体验,正在一步步从梦想照进现实。
说到底,英伟达这一脚 “技术油门”,不仅踩响了物理 AI 商业化的号角,更有机会重塑未来好几年的全球出行格局。但客观来讲,这套物理 AI 系统的落地和普及,还得跨过几道综合性的大坎:
全球路况和环境的差异摆在眼前,不管是国内复杂的非机动车混行场景,还是极端天气带来的路面状况突变,都要求系统持续迭代优化,才能做到精准适配。
开源生态的协同性难题还没解开,虽然开源模式能快速汇聚行业力量,但技术标准不统一、车企的适配能力参差不齐,很可能导致不同车型的用户体验天差地别,最终影响整个生态的竞争力。
数据安全和隐私保护是绕不开的刚性约束,智驾系统要实时处理海量的路况数据,怎么搭建起完善的安全防护体系,确保数据不泄露、不滥用,是英伟达和整个生态链必须攻克的关键课题。
这套系统能不能顺利落地、能不能真的重塑出行生态,未来的发展值得咱们持续盯着看。