





【EV视界综合报道】近日,毫末智行联合清华大学AIR智能产业研究院、自动化所、港中文、上海交大、上海人工智能实验室在ICLR 2025上正式发布了最新自动驾驶研究成果《Diffusion-based Planning for Autonomous Driving with Flexible Guidance》。该算法创新性地设计了一种基于Diffusion Transformer 的自动驾驶规划模型架构——Diffusion Planner,可以高效处理复杂场景输入,并联合建模周车运动预测与自车规划中的多模态驾驶行为,充分发挥扩散模型在闭环规划中的潜力,可以解决现有基于学习的规划方法对后处理的严重依赖问题。此外,借助“扩散模型的引导机制”,这一模型在部署阶段能够灵活适应不同的驾驶需求,有效提高自动驾驶规划决策端泛化能力与实用性,能够极大提升自动驾驶的安全性和复杂场景的适应性。
ICLR(国际学习表征会议) 是机器学习和人工智能领域最重要的国际学术会议之一。ICLR 2025 作为第十三届会议,将于2025年4月24日至28日在新加坡博览中心(Singapore EXPO)举行。本届ICLR 2025中,本论文从全球11,672份投稿中脱颖而出,不仅被ICLR2025正式接收,并以1.8%的占比成功入选Oral Paper(即可以参加会议正式演讲),代表了大会对该算法成果的高度认可,极具技术前瞻性。
当前,自动驾驶系统正在从传统的模块化架构向端到端架构演进,而实现在复杂环境下的灵活决策规划的认知模块的模型化,成为实现端到端的一大关键挑战。传统的基于规则的方案,虽然已经产业中得到应用,但存在适应性差,调整成本高的问题。而行业正在尝试的一些模仿学习方案,虽然能直接学习专家驾驶行为,并随训练数据扩展来提升性能,但是模仿学习在多模态行为适应性、泛化能力和驾驶风格灵活调控上仍存挑战,特别是需要依赖后处理来优化模型输出。因此自动驾驶认知模型化需要探索新的思路。
近年来,扩散模型在决策领域得到广泛应用,但在自动驾驶规划中的探索仍然有限。现有研究多聚焦于运动预测和场景生成,关注开环性能,而非闭环规划。一些方法尝试将扩散模型应用于规划任务,但仅仅是沿用现有结构或扩展模型参数,缺乏针对性结构设计,导致仍然高度依赖后处理。
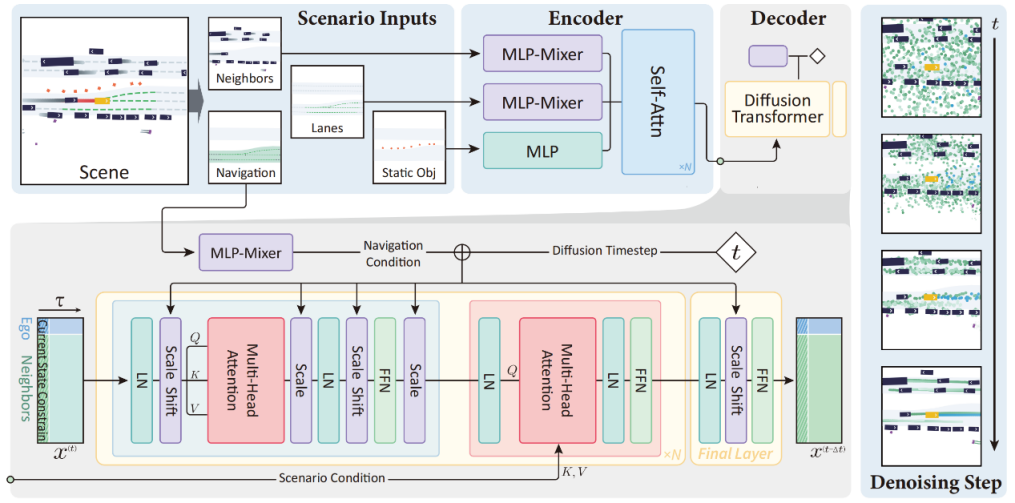
基于这些技术挑战,本论文提出了一种创新的“基于扩散模型的自动驾驶规划方法”——Diffusion Planner。通过扩散模型强大的数据分布拟合能力,Diffusion Planner能够精准捕捉复杂场景中周车与自车的多模态驾驶行为,并实现周车预测与自车规划的联合建模。同时,基于Transformer的结构设计高效处理复杂场景输入,能够实现20Hz的高速实时推理。此外,借助灵活的引导机制,模型在部署阶段即可适应不同的驾驶需求。
在大规模真实数据集 nuPlan 的闭环评估中,Diffusion Planner取得了SOTA级表现,?幅降低了对后处理的依赖,并在额外收集的 200 小时物流小车数据上验证了其在多种驾驶风格下的鲁棒性和迁移能力。
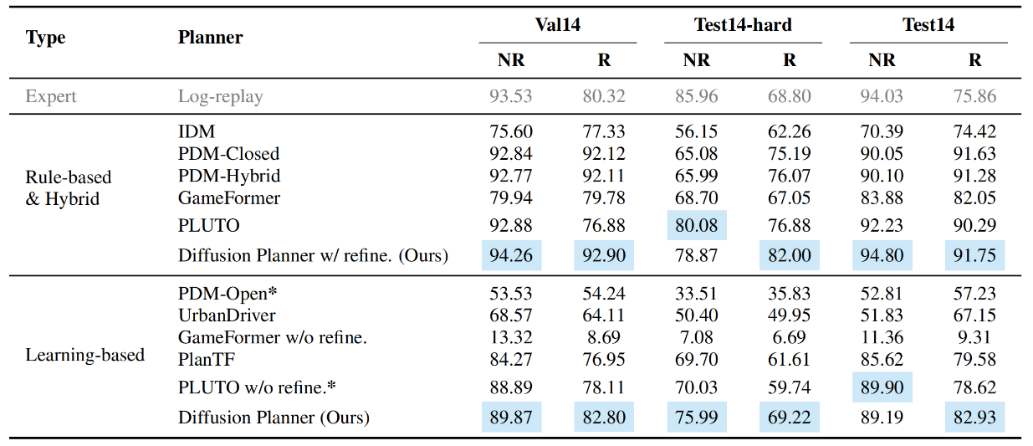
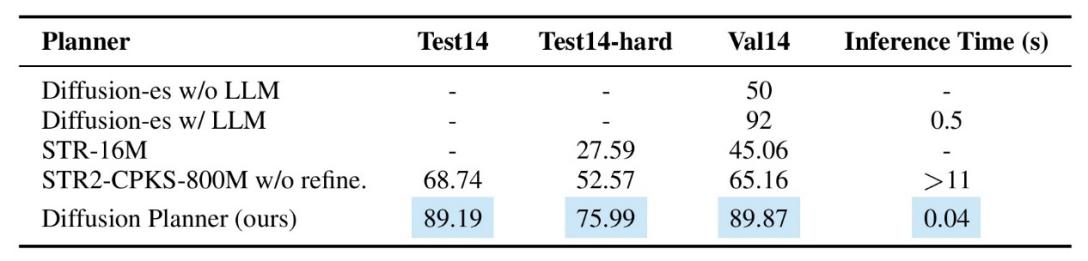
从对比现有基于扩散模型的自动驾驶规划算法来看,Diffusion Planner 有效降低了对后处理的依赖,同时实现了更高的推理频率,进一步验证了这一算法设计结构的有效性。再通过引入现有的后处理模块,算法性能又得到了进一步提升,这得益于模型生成的高质量轨迹,为后处理模块提供了更优的初始化参考轨迹。
该论文使用了毫末智行提供的200小时真实世界物流小车配送数据,作为nuPlan数据集的补充,并计划在后续开源。与nuPlan数据集中的车辆相比,毫末的物流自动配送车具有以下特点:尺寸较小,运行速度较低;可以在主干道和自行车道上行驶;与行人和骑行者的交互更为频繁,同时面临不同的行驶规则。通过在该数据集的测试结果显示,Diffusion Planner依然保持了最佳表现。

毫末末端物流自动配送车小魔驼HD05
毫末智行无人物流技术负责人赵祖轩表示,针对这一算法,毫末团队已经进入实车测试阶段,即以车端的感知端的BEV+认知端的Diffusion Planner相结合的方案,率先实现端到端方案在末端物流自动配送场景的应用落地。
毫末智行,作为一家致力于自动驾驶的人工智能技术公司,始终坚持以数据驱动为核心,重点布局在乘用车智能驾驶、末端物流自动配送车、智能硬件三大业务,为客户提供领先的自动驾驶产品和无人配送服务的同时,也在源源不断地产出高质量的真实场景数据,有效地推动自身自动驾驶技术的升级和行业技术能力的发展。
Diffusion Planner方案的提出并取得 nuPlan SOTA 的成绩,表明该算法在技术、性能和适应性等方面都达到了行业领先水平。这不仅为自动驾驶实际应用下的安全性、效率和舒适性提供了解决方案,也为自动驾驶认知端的模型化升级提供了新的思路,有利于整个自动驾驶行业技术的升级发展。




